
PaddleOCR表格识别镜头专利并输入
PaddleOCR表格识别镜头专利并输入 在复现镜头专利时,往往会需要按照专利表格中的内容输入数据,这个过程繁琐且容易出错。本项目拟采用PaddleOCR识别专利表格信息,并利用Zemax和CodeV的API识别输入。 开源项目链接:PaddlePaddle/PaddleOCR at release/3.3 该文件工作目录禁止存在中文 部署方法 安装anaconda 如果已安装并部署好可跳过。 需要注意,anaconda和python安装一个就可以,最好不要重复安装,否则会导致部分下载路径冻结。 anaconda安装链接可参考:最新版最详细Anaconda新手安装+配置+环境创建教程_anaconda配置-CSDN博客 还需要修改pip下载路径,否则会占用大量C盘空间,方法可参考:conda环境配置、pip安装位置问题与解决_conda安装和pip安装包位置-CSDN博客 CUDA和CUDNN安装 这步如果电脑无英伟达GPU或者想使用CPU部署可以跳过。CPU跑一张图片的时间大概在十几秒。 注意如果确保兼容的情况下,要安装CUDA12.6或者CUDA11.8。 2025 CUDA...
矢量像差理论(NAT)理论推导
矢量像差理论(NAT)理论推导 旋转对称系统的波前像差 对于旋转对称系统,波前像差的矢量展开可以表示为: W=W[(H⃗⋅H⃗),(H⃗⋅ρ⃗),(ρ⃗⋅ρ⃗)]=∑j∑p∞∑n∞∑m∞(Wklm)j(H⃗⋅H⃗)p(H⃗⋅ρ⃗)n(ρ⃗⋅ρ⃗)m\tag{1} \begin{align} W&=W\left[(\vec H \cdot \vec H ),(\vec H \cdot \vec \rho ),(\vec \rho \cdot \vec \rho ) \right] \\ &=\sum_j \sum_p^{\infty} \sum_n^{\infty} \sum_m^{\infty} (W_{klm})_j(\vec H \cdot \vec H )^p(\vec H \cdot \vec \rho )^n(\vec \rho \cdot \vec \rho )^m \end{align} W=W[(H⋅H),(H⋅ρ),(ρ⋅ρ)]=j∑p∑∞n∑∞m∑∞(Wklm)j(H⋅H)p(H⋅ρ)n(ρ⋅ρ)m(1)...
文献阅读——Design method of off-axis reflective freeform zoom optical systems
文献阅读——Design method of off-axis reflective freeform zoom optical systems Zhao G, Zhu J. Design method of off-axis reflective freeform zoom optical systems[J]. Optics Express, 2024, 32(16): 28806-28820. 摘要: 本文提出了一种偏轴反射变焦光学系统的设计方法。该方法可用于设计包含多面镜的离轴变焦光学系统。首先,针对不同变焦位置的离轴球面系统求解,以大致满足不同变焦位置光功率的要求,确保后续计算的收敛。然后,通过逐点迭代自由曲面,修正系统的光功率和像差,从而获得进一步优化的良好起点。为展示该方法的有效性,提供了三个设计示例,包括两套偏轴三镜变焦光学系统和一套离轴四镜变焦光学系统。使用所提方法,可以为这些系统找到良好的起点。优化后,这三种系统的成像质量接近衍射极限。 设计方法 可以分为两部分: 求离轴球面起点 自由曲面优化 在这里实际上只对第一步进行研究。 3.3案例 ...
变焦离轴四反学习笔记
变焦离轴四反学习笔记 一阶参数计算 对于一阶参数计算,其各参数符号规则与同轴反射式相同。 ABCD矩阵 近轴光线传输理论中,高度与角度公式可以写为: \begin{cases}\tag{1}\label{eqn1} y'=y + \dfrac{t}{n'}n'u'\\ n'u'=nu-y\phi \end{cases} 根据\eqref{eqn-1}进行光线追迹,便可以得到近轴像面信息。 \tag{2}\label{eqn-2} \begin{bmatrix} a_{11} & a_{12}\\ a_{21} & a_{22} \end{bmatrix} \begin{bmatrix} x\\ y \end{bmatrix} \Longrightarrow \begin{cases} a_{11}x+a_{12}y\\ a_{21}x+a_{22}y \end{cases} 根据矩阵运算基本原理\eqref{eqn-2},可以将近轴光线追迹公式\eqref{eqn-1}写成矩阵的形式。 其中y+tn′n′u′=y+tn′(nu−yϕ)=tn′nu+(1−tn′ϕ)yy+\...
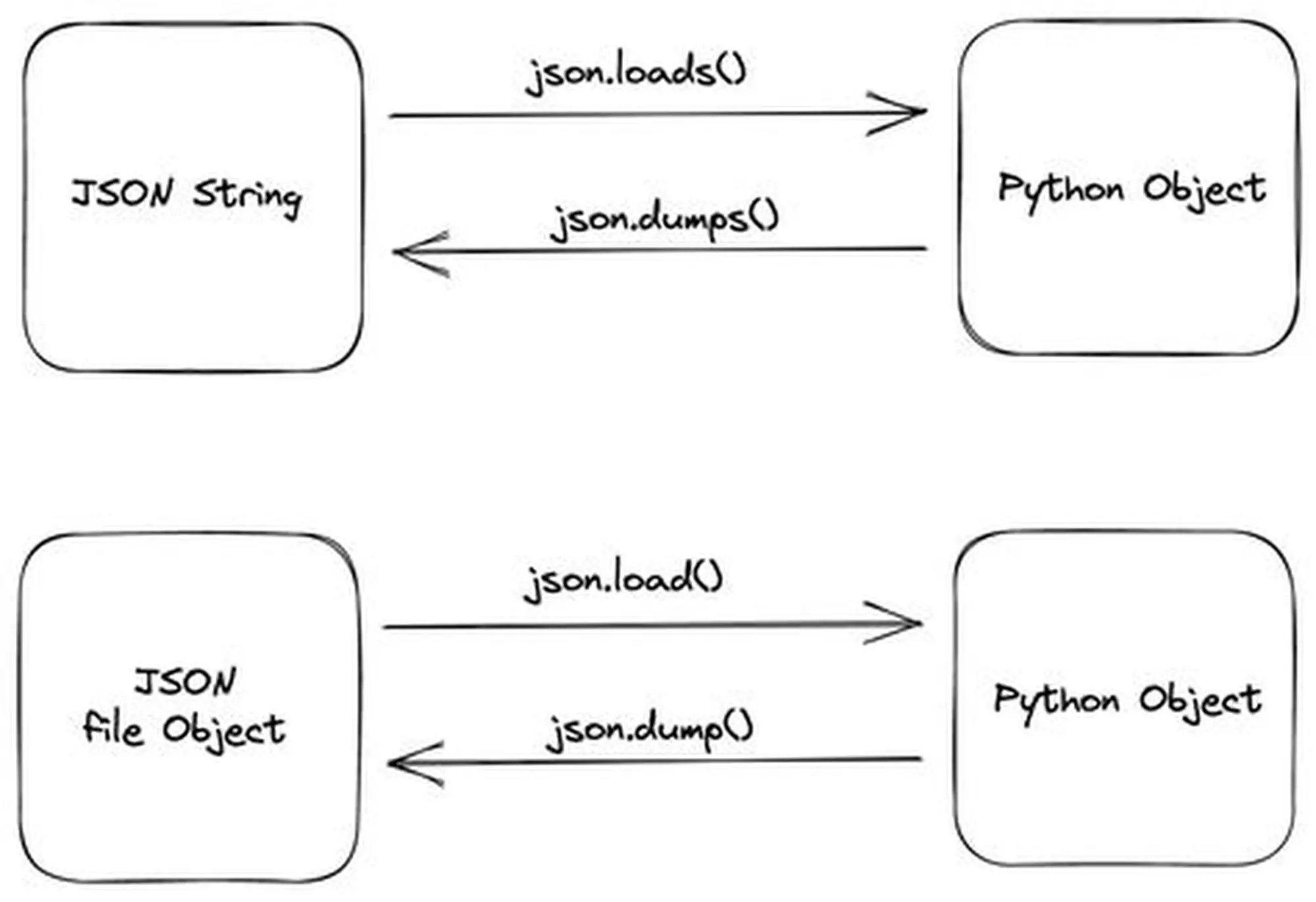
python读取和保存json文件
使用python实现读取和保存json文件,项目复杂度不高,不涉及嵌套读取和嵌套保存。
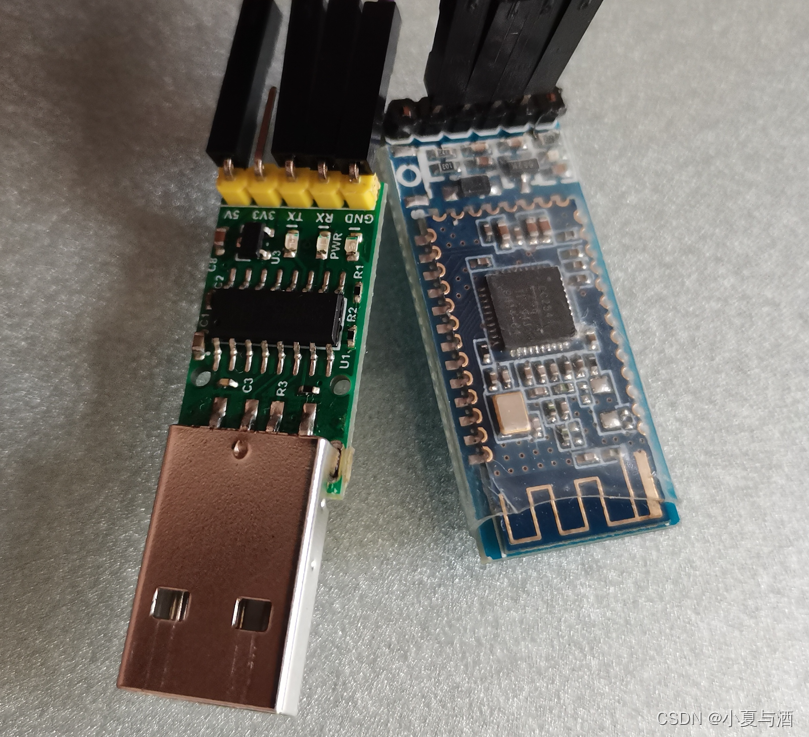
python读取COM口信息并使用串口
使用python实现识别并读取串口设备信息,发送和接收串口数据,数据帧协议的打包和解包方法。
tkinter学习笔记
学习tkinter图形化编程的听课笔记,记录的并不多,因为项目要求的任务比较基础。

硬件实用设计汇总
硬件常用原理图设计
硬件学习笔记1
硬件基本原理学习