矢量像差理论(NAT)理论推导
矢量像差理论(NAT)理论推导
旋转对称系统的波前像差
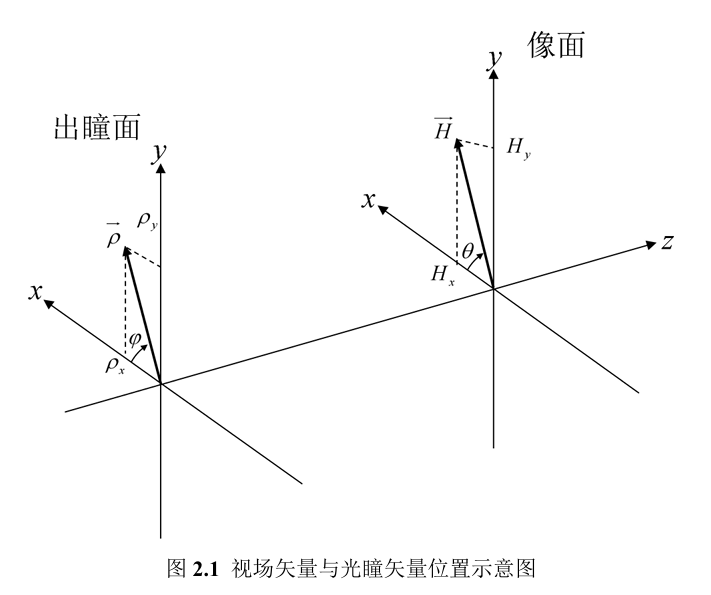
对于旋转对称系统,波前像差的矢量展开可以表示为:
其中 ,分别表示归一化视场场和光瞳矢量,分别表示视场矢量与x轴的夹角和光瞳矢量与x轴的夹角。表示像差系数。
像差系数存在转换关系:
赛德尔像差可以表示为:
是常数系数,和是边缘光线和主光线的Snell不变量,表示拉格朗日不变量。y和表示边缘光线和主光线高度,和表示对应的入射角。
非旋转对称系统矢量像差
对非旋转系统引入了向量来表示表面的像差场中心偏移矢量,因此波前像差可以改写为:
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Cucumber的Blog!
相关推荐
2026-03-20
离轴反射系统非球面光线追迹
光学圆锥面的描述 在光学设计软件中,一个光学表面通常由其矢高z和径向距离r描述: z=cr21+1−(1+k)c2r2z=\frac{cr^2}{1+\sqrt{1-(1+k)c^2r^2}} z=1+1−(1+k)c2r2cr2 对于笛卡尔系来说,光学表面可以描述为 x=cy21+1−(1+k)c2y2x=\frac{cy^2}{1+\sqrt{1-(1+k)c^2y^2}} x=1+1−(1+k)c2y2cy2 建立坐标系 以圆锥面的矢高方程对应的笛卡尔系进行建立模型, 计算光线交点 设入射光线方程为ax+by+c=0ax+by+c = 0ax+by+c=0 圆锥面面型方程为x=cy21+1−(1+k)c2y2x=\frac{cy^2}{1+\sqrt{1-(1+k)c^2y^2}}x=1+1−(1+k)c2y2cy2 联立可以得到解析解如下所示。 {x=c (−m (−c2 k−c2) n2−2 c m n+1c m2+c k+c−(−c k−c) nc m2+c k+c+mc m2+c k+c)21−c2 (k+1) (−m (−c2 k−c2) n2−2 ...
2026-03-17
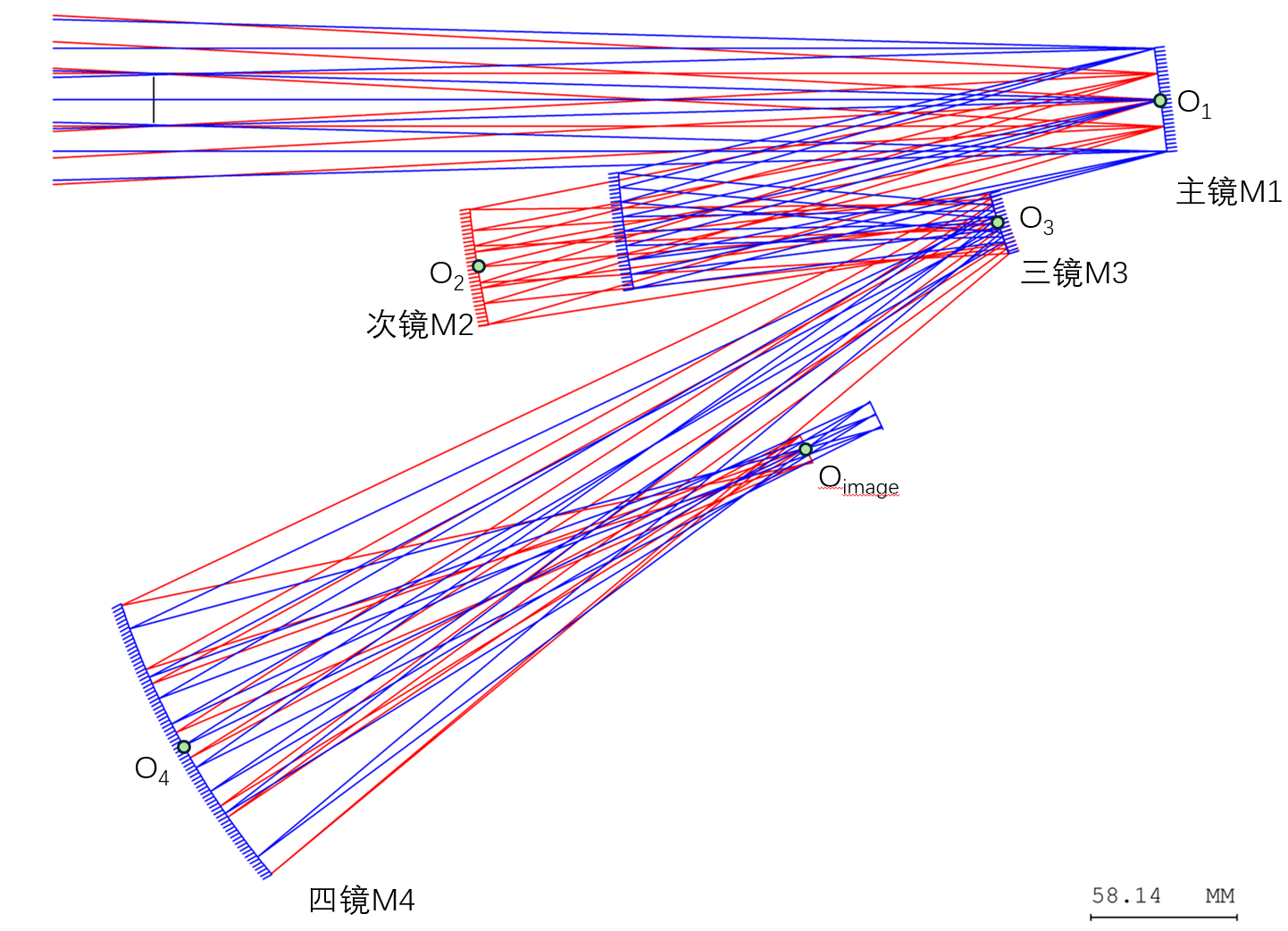
离轴反射系统真实光线追迹
离轴反射系统真实光线追迹 在学习离轴反射式初始结构生成时,发现matlab和CodeV的交互速度很慢,这严重影响了算法运行速度。并且对于变焦系统来说,使用API获取到的镜面边界位置不准,所以希望自己编写一套光线追迹程序以解决这一问题。 以下内容均为以主镜作为光阑推导 变量定义 定义四面反射镜分别为Mj\text{M}_jMj,jjj表示反射镜序号。反射镜中心点定义为Oj\text{O}_jOj,其坐标为(xOj,yOj)(x_{O_j},y_{O_j})(xOj,yOj)。反射镜曲率半径为RjR_jRj,球面球心定义为QjQ_jQj,坐标(xQj,yQj)(x_{Q_j},y_{Q_j})(xQj,yQj)。 规定O1O_1O1为坐标原点,坐标为(0,0)(0,0)(0,0)。向右为x轴正方向,向上为y轴正方向。 求解主镜入射点及出射光线方向 首先计算球心位置QjQ_jQj。主镜的球心位置可以用(R1⋅sinα1,R1⋅cosα1)+O1⃗(R_1 \cdot \sin{\alpha_1},R_1 \cdot \cos{\alpha_1})+...
2026-02-06
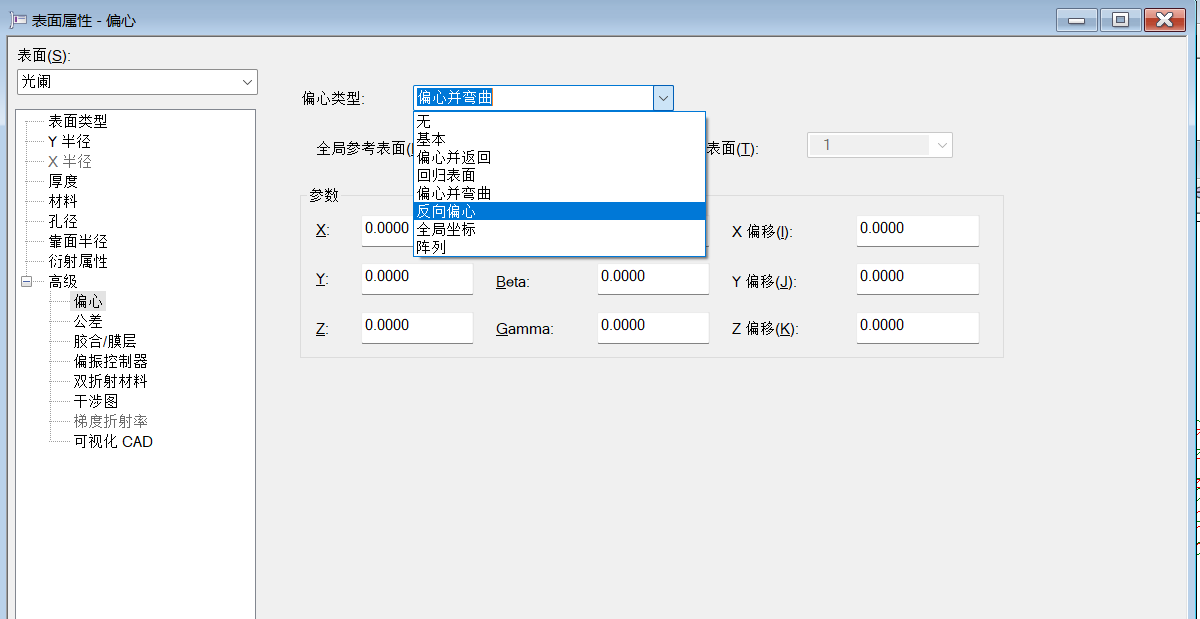
CodeV的偏心倾斜设置
对codev中偏心倾斜的设置方法和种类进行整理和理解
2026-02-26
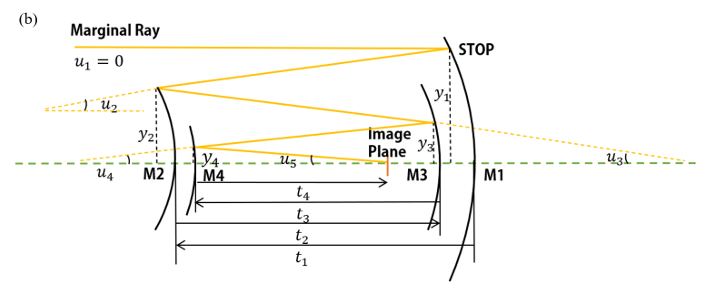
变焦离轴四反学习笔记
codev中离轴反射系统的符号规则,矩阵理论计算一阶光学参数。
评论